これが1997年度版・3号機の全容だ!
 |
←はロボットサッカー用に製作したロボットです. もちろん自作です. 今年はかなり本気で作りました. 性能よりも見た目のインパクトで勝負しました. おかげで大会では電源コードが見えない所で断線! 2会戦敗退となってしまいました(T_T) 悔しい! ですから,このロボットをここで紹介します. |

|
コントローラです. 私達はお金がありません. ですから中古の2chのプロポを買って改造してます. 結果的には6chとなります. このテクニックは電気回路に詳しい人のものです. |
 |
駆動部です.
TAMIYAのギヤボックスを使っています. ノーマルのモータは弱いので改造してあります. 1廻り大きなモータに換えると負荷電圧も上げれます. ちなみにノーマルで3V,改で6Vまでかけれます. 3Vと6Vでは機動力がまったく違います. 勝つための基本です. |
 |
受信部です. いわば脳みそですな. かなりコンパクトにまとまっています. コードが邪魔にならぬよう通称ザクパイプでまとめます. これも電気回路に詳しい人のおかげです. |
 |
シュート部です. このアームをグルグル回してシュートします. 長年の経験から素早いシュートが有効とわかっています. このアームグルグルは素早くボールを取り込めます. スイッチを逆に入れアームを逆回転させれば素早くシュート! これが勝利への秘訣なのですが・・・ |
 |
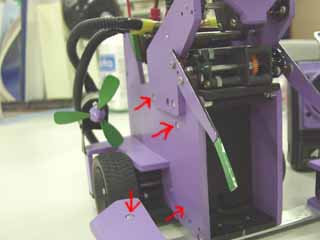
ファン部です.
使用するボールは直径150mmの発砲スチロールです. 非常に軽いのでファンで吸引・送風可能です. もしゴール手前にボールがあったとします. でも自機は結構遠くにあったら? ファンで送風すれば遠くからでもゴール! |
 |
タイヤです.
始めは自作していたのですが今はデキモノです. TAMIYAから出ているラジコン用の物です. さすがにTAMIYA製ギヤボックスとの相性は抜群! 試合のフィールドはアクリルなので滑ります. グリップの良し悪しで勝負が決まるのです! どんなにパワーがあっても滑ってちゃ制御できません. |
 |
腰です.
試合開始前は規定の大きさに収まっていないといけません. 200×200×250mmです. したがって開始前は腰を曲げて屈んだ状態になります. これで200mmをクリア. なぜこうまでして大きくしたいのか・・・ それは見た目です! だってバランス悪くなるもの,小さくすると. |
 |
上半身です.
大きくするのは実は見た目だけではないんです. ゴールは高さが600mmでボールは直径150mm. つまり床から450mmの部分を守らなければならないのです. 規定どうり200mmの高さにすると上400mmはがら空き! だからなにか障害物が必要なのですよ. 上半身を起こすとこれは高さが450mmになります. つまり上は150mmしか空かない. すきま150mmをねらってくるロボなどそういません. だから上半身(頭かな)で守るのです. |
  |
頭です.
ここに一番力をいれました. 基本的に特殊紙粘土でできてます. パテだと重くなるからです. 出来上がったときは自分を天才だと思いました. 目はLEDで真っ赤に光ります. ちなみに拘束具?は取れます. 取ると中からエグイのが出てきます. |
 |
腕です.
とにかく基本は幅5mmのアクリル板です. これを切ってヤスリかけてねじ止めして塗装です. |
 |
丸秘テクニックです. 板に穴を開けて止めるとねじ頭がでて無様です. そこで板にはねじ頭が入る下穴を入れます. これですっきり! |